El ingeniero mecánico Franco Piñan Basualdo, egresado del Instituto Balseiro, participó en el desarrollo de un micro robot del tamaño de un pequeño insecto. El trabajo fue realizado en colaboración por instituciones de Francia y Bélgica, y publicado en la revista internacional Science Robotics. Desde Europa, el joven respondió preguntas sobre esta novedad.
Fecha de publicación: 16/04/2021
En un mundo en el que la miniaturización de piezas electrónicas es la regla, hallar modos de avanzar en la microfabricación de piezas de computadoras, celulares y muchos otros dispositivos tecnológicos es un gran desafío. Ahora, un equipo de profesionales de física e ingeniería de la Universidad Libre de Bruselas (ULB, por sus siglas en francés), de Bélgica, y del Instituto FEMTO-ST, de Francia, presentaron un micro robot que podría ayudar en este campo de modo innovador.
En el desarrollo, cuyos parte de sus resultados fueron publicados en la revista Science Robotics, colaboraron dos equipos: uno de física aplicada, del laboratorio TIPs (siglas por Transferencias, Interfaces y Procesos) de la UBL, y de micro robótica, del Instituto FEMTO-ST (CNRS / UBFC), de Francia. Uno de sus integrantes es el ingeniero mecánico argentino Franco Piñan Basualdo, que está realizando su doctorado en esta temática en cotutela entre ambas instituciones, y reside en Bruselas.
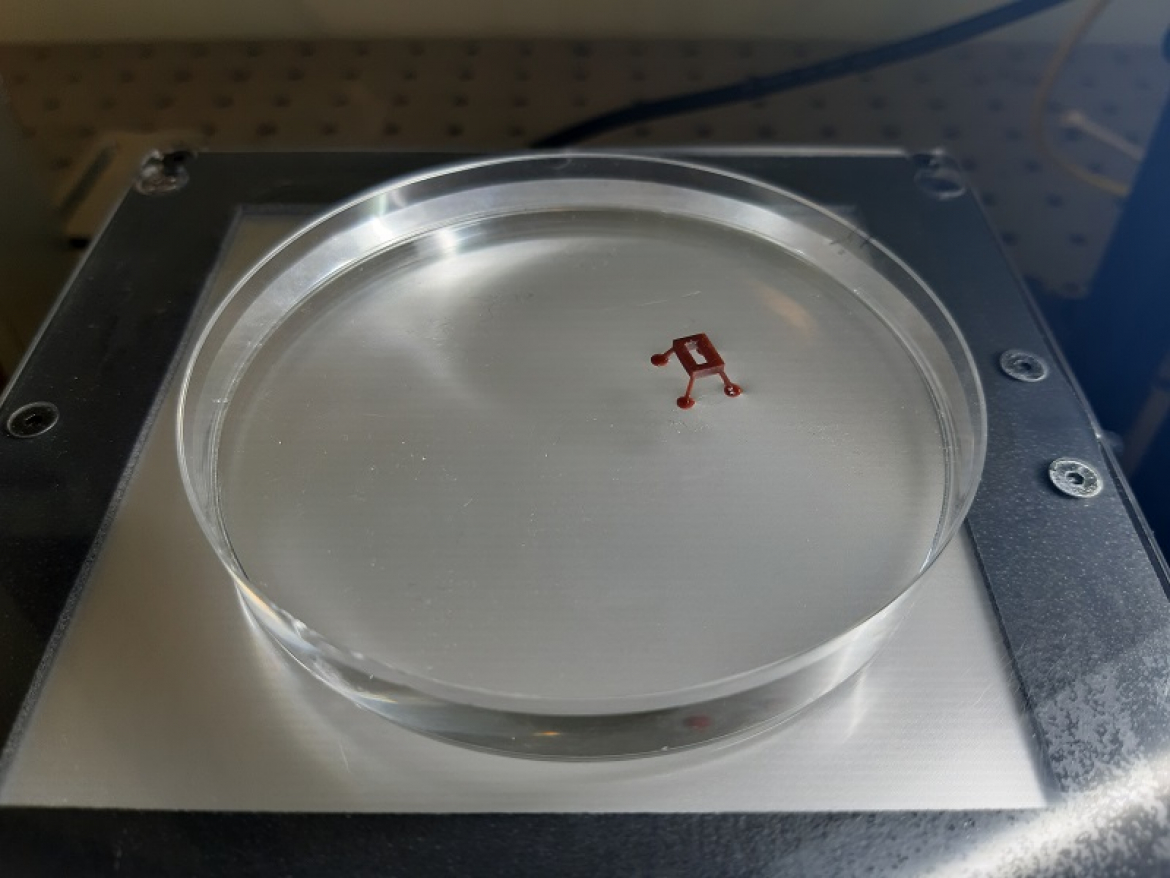
Hasta ahora, se han desarrollado numerosos robots que se mueven en el aire o en el agua. La interfaz agua-aire había sido poco explorada, hasta ahora: el robot que crearon es tan pequeño como un insecto que puede “caminar” sobre el agua. Mide entre 5x5x10 milímetros, o sea, es más pequeño que una pulga sin llegar a ser invisible al ojo humano.
El nombre del proyecto es “ThermoBot”, y consiste en una plataforma que utiliza un láser infrarrojo para manipular objetos microscópicos que están en la superficie del agua, entre ellos el microrobot. También han demostrado la manipulación de otras piezas, como por ejemplo esferas de metal de 0,5 mm de diámetro. Esa técnica podría utilizarse en la industria y en otros sectores, como la salud, observan desde la colaboración.
“La novedad de nuestro desarrollo es la aplicación de un fenómeno asociado a la tensión superficial de los fluidos en micro-robótica. La tensión superficial es una propiedad de las interfaces entre fluidos, como entre el agua y el aire, que provoca que la misma se comporte similar a una membrana elástica, permitiendo, por ejemplo, a algunos insectos caminar sobre la misma”, comenta el ingeniero Franco Piñan Basualdo, que tiene 26 años y que se recibió en 2017 de Ingeniero mecánico en el Instituto Balseiro.
El joven realizó sus primeros años de estudios universitarios en Ingeniería electrónica la Universidad Nacional de Córdoba y luego decidió rendir el examen de ingreso en el Balseiro, donde completó la carrera de Ingeniería mecánica con beca completa de la CNEA. El siguiente paso fue realizar su doctorado en co-tutela entre el citado laboratorio TIPs y el Instituto FEMTO-ST. Y ahora está en su tercer año de su doctorado (VER SUBNOTA: “Lo que más valoro de mi formación en el Balseiro….”).
Si bien los efectos de la citada tensión en la superficie de los fluidos son despreciables a escala “humana”, se vuelven dominantes a pequeñas escalas, debajo del milímetro. Es por ello que el proyecto apunta a utilizar esta tensión superficial en micro-robótica a través del efecto termo-capilar, también llamado “efecto Marangoni”, comenta el ingeniero.
“En pocas palabras, apuntando un láser a la superficie de un volumen de agua, logramos incrementar localmente la temperatura, lo que genera un flujo de agua en la superficie desde la zona caliente a la zona fría debido al efecto previamente mencionado. De esta manera, cualquier objeto (lo suficientemente pequeño) flotando en la superficie, se verá repulsado por el punto laser”, agrega Piñan Basualdo. Finalmente, explica, desplazando el punto laser con un espejo piezoeléctrico, se puede controlar la posición y orientación de dichos objetos.
El ingeniero argentino cuenta que el sistema se basa en el principio de termocapilaridad. “Concretamente, un láser escanea la superficie del agua donde se disponen varias formas 3D, que varían en tamaño desde 400 micrómetros hasta un centímetro de longitud. Algunas son simples canicas, otras tienen cuatro patas”, dice.
“Cuando el láser calienta el líquido, cambia su tensión superficial y genera corrientes de convección. Si apunta al frente de uno de los objetos, será empujado con un control muy fino sobre su movimiento. Un sistema de espejos controla la trayectoria del láser hasta el punto de que dirige un objeto de un centímetro con una precisión de un milímetro, lo que permite, por ejemplo, armar piezas de rompecabezas en miniatura”, describe.
Algunos objetos se mueven a velocidades muy altas en su escala: hasta veinte veces su tamaño por segundo, es decir, el equivalente a 200 km / h con una precisión de 50 centímetros para un automóvil, según detalla Piñan Basualdo. “Las aplicaciones de ThermoBot aún no se han inventado, el equipo sugiere que su plataforma de microrrobótica sin contacto podría usarse para transportar y organizar componentes miniaturizados”, agrega.
¿Cuál fue el rol del ingeniero argentino en este desarrollo? Realizó dos contribuciones principales: la modelización del flujo termo-capilar, a través de simulaciones numéricas y desarrollos analíticos, y la automatización de las diferentes maniobras realizadas.
“La principal ventaja de este nuevo tipo de manipulación es que el efecto es localizado alrededor del láser, permitiendo la manipulación simultanea de varios objetos, en contraste con la manipulación magnética. Esto posibilita el ensamblaje de éstos con posibles aplicaciones en micro-fabricación”, destaca.
Ante la consulta de cuáles son los futuros pasos de la investigación, concluye: “Por el momento prevemos dos posibles pistas a explorar: la miniaturización del sistema para la manipulación de objetos aún más pequeños, y la solidarización definitiva de los objetos ensamblados ya que de momento estos no pueden ser retirados de la interface sin separarlos”. La micro robótica, sin duda, dará que hablar en los próximos años.
--
Área de Comunicación Institucional del
Instituto Balseiro.
San Carlos de Bariloche, 16/04/2021
Facebook.com/InstitutoBalseiro - Twitter.com/IBalseiro
Instagram.com/institutobalseiro / YouTube +Instituto Balseiro
Contacto: Esta dirección de correo electrónico está siendo protegida contra los robots de spam. Necesita tener JavaScript habilitado para poder verlo.
Más noticias: www.ib.edu.ar/index.php/comunicacion-y-prensa/noticias.html